
Исследование и внедрение технологии автофокусировки инфракрасных линз на основе программируемой вентильной матрицы
Технология автофокусировки играет важную роль в области инфракрасного тепловизионного мониторинга. В настоящее время существуют некоторые проблемы с технологией инфракрасной автофокусировки, такие как низкий уровень успеха, сложная архитектура и низкая скорость фокусировки. Таким образом, в данном исследовании предлагается технология автофокусировки инфракрасной линзы на основе FPGA, которая реализует функции обработки, отображения и автофокусировки инфракрасных изображений с помощью одной FPGA.
Учитывая общие характеристики шума вертикальных полос и случайного шума в инфракрасных изображениях, это исследование улучшает и оптимизирует алгоритм оценки четкости инфракрасного изображения и алгоритм альпинизма в процессе фокусировки. Результаты экспериментов показывают, что алгоритм и метод реализации, предложенные в этом исследовании, могут значительно помочь в фокусировке на инфракрасной линзе. Между тем, предлагаемый метод обладает такими характеристиками, как высокая интеграция, высокая скорость фокусировки и высокая вероятность успеха, и, таким образом, имеет широкие перспективы применения.
В последние годы технология инфракрасного тепловидения широко используется в национальной обороне, войне, обнаружении, мониторинге и других областях. Для тепловизионных мониторов, используемых в пограничной и береговой обороне, инфракрасному поворотному столу требуется фиксированный период вращения и позиционирования во время использования для достижения цели патрулирования. Каждый раз, когда он поворачивается в новое положение, его необходимо перефокусировать, чтобы получить четкое изображение. Таким образом, функция автоматической фокусировки инфракрасного тепловизора может значительно облегчить наблюдение и использование оператором.
По сравнению с технологией визуализации в видимом белом свете, технология инфракрасной визуализации реализует визуализацию наблюдаемого объекта на основе нагрева самого наблюдаемого объекта. Поскольку принцип формирования изображения несовместим с принципом формирования изображения в видимом белом свете, технология формирования инфракрасного изображения и технология формирования изображения в белом свете имеют определенную степень реализации. Разница. Технология автофокусировки на основе изображения очень хорошо зарекомендовала себя в области обработки изображений в белом свете. В литературе [1] и литературе [2] автор использует ПК и FPGA для завершения автофокусировки объектива на основе изображений в видимом белом свете соответственно.
В практических приложениях на производительность тепловизора обнаружения влияют многие факторы, такие как инфракрасные детекторы, схемы аналого-цифрового преобразования, структурное рассеивание тепла и оптические линзы. Традиционная технология автофокусировки изображения в белом свете плохо влияет на автофокусировку инфракрасных изображений. Поэтому необходимо предложить технологию автофокусировки, основанную на особенностях самого инфракрасного изображения (явление вертикальных полос, чрезмерный шум и т. д.).
В данной статье предлагается технология автофокусировки инфракрасных линз на основе FPGA. По сравнению с литературными [3] улучшается алгоритм оценки качества изображения по характеристикам вертикальных полос на инфракрасном изображении. По сравнению с литературными данными [4] инфракрасное изображение зашумлено. Особенности: Оптимизируйте алгоритм подъема на холм для достижения контроля над объективом.
По сравнению с литературой [5] данная статья не предполагает участие главного компьютера. Он полностью реализуется самой FPGA для получения изображения, оптимизации изображения, оценки четкости изображения, реализации алгоритма подъема на холм, управления двигателем и т. д. В работе это значительно улучшает интеграцию всего тепловизора.
1. Состав тепловизора и принцип автоматической фокусировки
1.1 Состав тепловизора
Тепловизор с функцией автофокусировки, предложенный в данной статье, показан на рисунке 1. Основные компоненты включают в себя инфракрасную линзу, инфракрасный детектор, схему обработки изображения, схему FPGA, DDR3, схему привода двигателя, двигатель фокусировки и механизм фокусировки. (механическая передача).

Рис.1 Инфракрасный тепловизор с автофокусом
1.2 Принцип работы тепловизора и принцип работы автоматической фокусировки
Основная архитектура инфракрасного тепловизора представлена на рисунке 2.
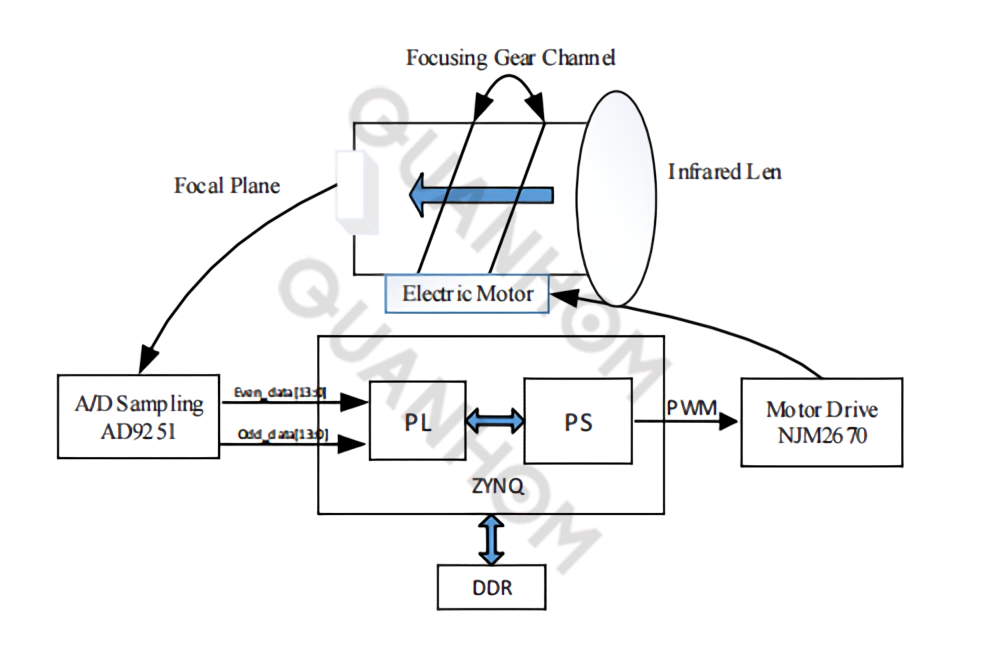
Рис.2 Основная конструкция инфракрасного тепловизора
На рисунке 2 мы видим состав всего тепловизора. Схема работы тепловизора следующая.
(1) Свет попадает в фокальную плоскость инфракрасного детектора через инфракрасную линзу. Эффективная длина волны спектра, которую может пропустить инфракрасная линза, составляет 8–12 м, что позволяет фильтровать видимый белый свет.
(2) Инфракрасная фокальная плоскость преобразует инфракрасный свет в электрические сигналы. Эффективное разрешение изображения выбранной инфракрасной фокальной плоскости составляет 720×576.
(3) Выходной сигнал инфракрасной фокальной плоскости представляет собой аналоговый видеосигнал, который необходимо преобразовать в цифро-аналоговый формат в схеме, а инфракрасный аналоговый сигнал преобразуется в четные и нечетные цифровые видеоданные размером 14 бит с Чип преобразования AD9251.
(4) Данные о четности должны быть реорганизованы внутри FPGA, а затем на инфракрасном изображении выполняется обработка пост-изображения, такая как коррекция неравномерности, улучшение изображения, вертикальное чередование и температурная компенсация. Эта часть не является предметом данной статьи и обсуждаться не будет.
На этом этапе данные о четности, сгенерированные на этапе (3), необходимо построчно объединить в полную картину. Значения серого двух соседних пикселей в каждой строке изображения поступают из разных источников (каналов четности). Создайте феномен «вертикальных полос». Вертикальные полосы часто встречаются в инфракрасных изображениях. На этом этапе FPGA оптимизирует изображение, чтобы устранить помехи, вызванные вертикальными полосами, и сделать весь кадр изображения более плавным и плавным.
(5) Обработанные данные изображения кодируются в видеоформат PAL через внешнюю схему и напрямую выводятся на дисплей, либо они могут быть сжаты и закодированы на сервер для отображения через сеть. Для автофокусировки необходимо полагаться на данные изображения, созданные на этом этапе.
(6) Выполните оценку четкости изображения на основе изображения, созданного в (5). FPGA обладает мощными возможностями обработки параллельных данных, поэтому для оценки четкости выбирается алгоритм градиентной энергии. Обычно используемый алгоритм градиентной энергии требует обработки данных для всех пикселей всего изображения, что требует относительно большого объема вычислений и длительного времени обработки. В этой статье предлагается улучшенный алгоритм градиентной энергии для оценки четкости изображения, подробности см. в главе 2.
(7) Конец PL FPGA передает результат оценки четкости изображения следующему каналу связи для обработки. На этом этапе все (6) и (7) при разработке литературы [5] полагаются на реализацию главного компьютера на ПК. В этой статье мы продолжим реализацию автоматической фокусировки на основе ясности в FPGA.
(8) Конец PL FPGA использует алгоритм подъема на холм для управления двигателем в соответствии с данными оценки четкости, а затем регулирует фокусное расстояние объектива, наконец, получая четкое изображение и завершая фокусировку.
Алгоритм восхождения на холм широко используется для автоматической фокусировки изображений в видимом свете. Однако из-за большого шума и вертикальных полос на самом инфракрасном изображении в процессе восхождения появится состояние «псевдовершины холма». Наличие «ложных гор» напрямую приведет к выходу из строя автофокуса. По этой причине в этой статье оптимизирован и улучшен алгоритм подъема на гору, подробности см. в главе 3.
Таким образом, процесс реализации автоматической фокусировки показан на рисунке 3. Весь процесс представляет собой процесс обратной связи с обратной связью, который требует повторной настройки и оптимизации для достижения, наконец, наиболее четкого состояния изображения, то есть сфокусированного состояния. В этой статье используется FPGA серии ZYNQ компании Xilinx FXC7Z030-2FBG676 для реализации вышеуказанных шагов (4)–(8). ZYNQ разделен на конец PL и конец PS.
Конец PL представляет собой программируемую матрицу логических вентилей для обработки изображений и оценки четкости, а конец PS представляет собой ядро ARM, которое используется для реализации алгоритмов подъема в гору и управления двигателем. При этом FPGA внешне оснащена двумя чипами DDR3, модель Micron MT41J128M16HA, с одним чипом емкостью 256 МБ и двумя чипами емкостью 512 МБ, которые используются для кэширования данных видеоизображения.
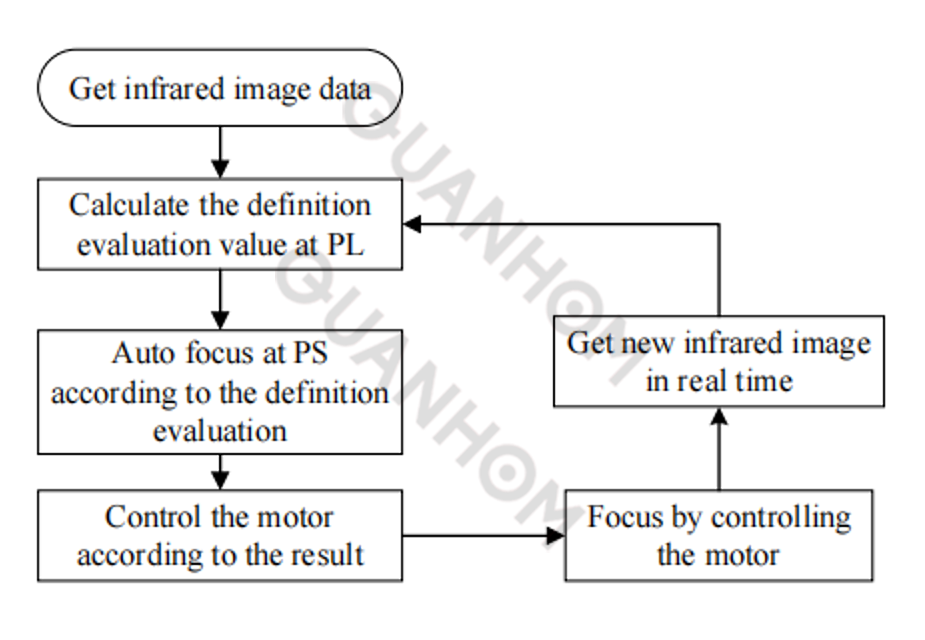
Рис.3 Процесс автофокусировки
2. Реализация оценки качества инфракрасного изображения в FPGA.
2.1 Алгоритм оценки четкости
В литературе [6] дается всестороннее и конкретное введение в алгоритм оценки определения, сочетающий в себе характеристики инфракрасных изображений и сложность реализации FPGA. В этой статье для оценки резкости изображения используется алгоритм градиентной энергии.
Как показано на рисунке 4, сумма квадратичных разностей вычисляется по значениям серого пикселей в области маски 3×3 пикселей изображения.
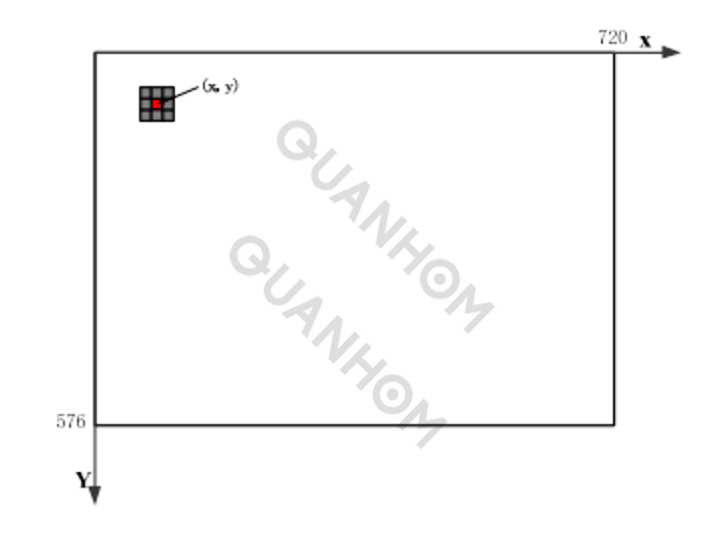
Рис.4 Расчет энергии градиента с использованием маски 3х3
Для пикселя (x, y) на рисунке определите его значение энергии как F(x, y) как сумму квадратов значений серого окружающих 8 соседних пикселей и их разностей. Как показано в формуле (1):
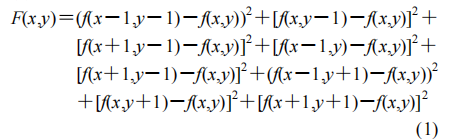
Сложите сумму всех квадратов разности серых пикселей, чтобы получить значение энергии градиента изображения:
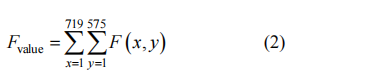
Для изображения высокой четкости, поскольку детали изображения больше, значение энергии градиента Fценитьбудет относительно большой величиной. Для размытого изображения значение каждого пикселя мало отличается, а значение Fценитьтоже очень мал. Для однопиксельного изображения (все значения пикселей одинаковы) Fvalue=0.
Следовательно, значение Fценитьможет отражать степень детализации изображения, что, в свою очередь, отражает четкость изображения. Алгоритм градиентной энергии может оценить резкость изображения. В этой статье этот алгоритм используется для оценки резкости инфракрасного изображения.
2.2. Улучшение алгоритма градиентной энергии при оценке четкости инфракрасного изображения.
Энергия градиента, упомянутая в разделе 2.1, дает хороший результат для оценки четкости изображений в видимом белом свете. Однако, поскольку инфракрасные изображения объединяются с помощью данных нечетных и четных столбцов (шаг 3, упомянутый в разделе 1.2), соседние левые и правые пиксели отображаются серым цветом. Значение степени сильно отличается, и эффект фокусировки от прямого использования традиционного алгоритма оценки энергии градиента не очень хорош. В этой статье внесены определенные улучшения в алгоритм в ответ на это явление, используя маску 3×5 вместо маски 3×3, что позволяет избежать разницы, вызванной пикселями изображения разных видеоисточников, и уменьшить шум, вызванный вертикальными полоски до самых маленьких.
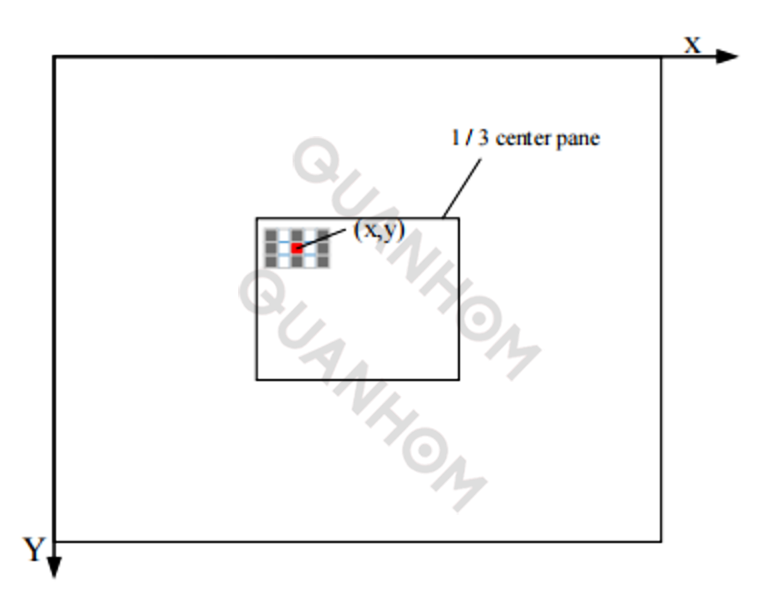
В то же время, ввиду требований времени автоматической фокусировки тепловизора, используемый в данной статье расчет энергии градиента не рассчитывает значение пикселя всего изображения, а берет для расчета пиксели в средней 1/3 области, чтобы сумма расчета была рассчитана для всей картинки 1/9 суммы. После долгих экспериментальных проверок эффект автофокусировки, рассчитанный по 1/3 площади центра изображения, соответствует эффекту всего изображения.
Улучшенный выбор маски и центральной области показан на рис. 5.
2.3 Реализация улучшенного алгоритма в FPGA
Конец PL FPGA использует FIFO и регистр для реализации буфера 9 данных окна маски. Программа на стороне PL должна: ① спроектировать синхронизацию сигналов управления чтением и записью FIFO; ②кэшировать данные маски 3×5; ③рассчитать сумму дисперсии однопиксельной маски 3×5 и вывести данные.
На рисунке 6 показана принципиальная схема внутреннего управления чтением и записью FIFO FPGA. Когда прибудет первая строка данных, запишите ее в FIFO1; когда поступит вторая строка данных, прочитайте первую строку данных, хранящуюся в FIFO1, и запишите ее в FIFO2, и одновременно запишите вторую строку данных в FIFO2; когда поступит третья строка данных, одновременно прочитайте данные в FIFO1 и FIFO2. В это время третья строка данных поступает в последующую группу регистров REG1 вместе с первой и второй строками данных, хранящимися в FIFO1 и FIFO2 ~REG9. Данные REG1~REG9 соответственно представляют (x-2,y-1), (x,y-1), (x+2,y-1), (x-2,y), (x, y), (x+2,y), (x-2,y+1), (x,y+1), (x+2,y+1) 9 очков.
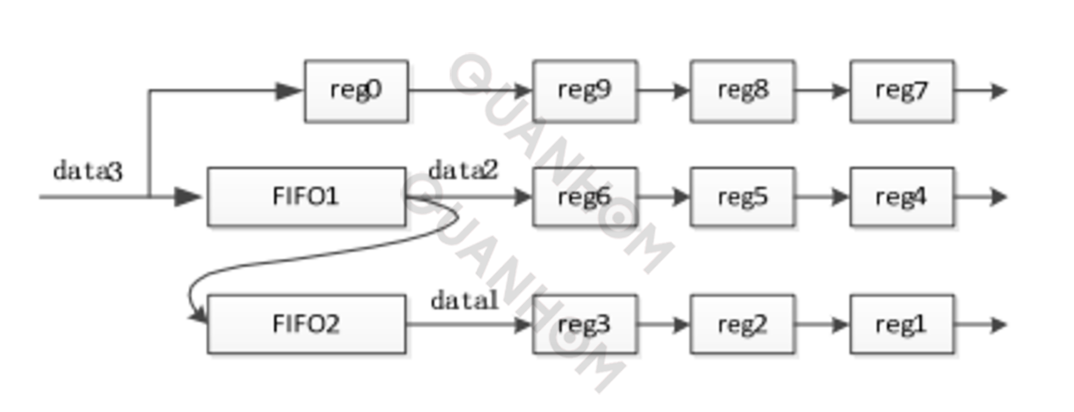
Рис.6 Кэширование данных маски 3×3 по FIFO и регистрация
По 9 данным в регистрах REG1~REG9 на рисунке 6 FPGA вычисляет дисперсию значений серого пикселей в REG5 и остальных 8 регистрах (формула (1)). Поскольку улучшенный алгоритм вычисляет только среднюю 1/3 области, программа устанавливает счетчик столбцов и счетчики строк для подсчета строк и столбцов кадра изображения. Когда счетчик столбцов имеет значение 241~480, а счетчик строк - диапазон 193~384 (этот диапазон означает, что для экрана с разрешением 720x576 1/3 точки пикселя находится в центральной области), данные пикселей считается доступным для расчета. Накопите значения дисперсии всех пикселей в этом диапазоне и, наконец, получите значение энергии 32-битного градиента (формула (2)).
Согласно теории, представленной выше, чем больше значение 32 бит, тем четче изображение, что дает основу для альпинизма для последующей настройки фокуса.
3. Реализация улучшенного алгоритма восхождения на гору в FPGA.
3.1 Автоматическая фокусировка на основе алгоритма подъема на гору
В ссылке [7] содержится более подробное введение в алгоритм подъема на гору. Как показано на рисунке 7, основным принципом алгоритма восхождения на холм является процесс непрерывной аппроксимации максимального значения энергии градиента. Как видно из блок-схемы автофокусировки на рисунке 3, изображение будет меняться после каждой фокусировки, и энергия градиента также будет меняться соответственно. В этом непрерывном процессе изменений найдите максимальное значение энергии градиента, которое является самым четким моментом изображения. Положение объектива, соответствующее наиболее четкому изображению, является положением фокуса.
Из схематической диаграммы на рисунке 7 видно, что в процессе фокусировки имеется 8 этапов восхождения на гору. Первые три шага всегда относятся к процессу «вверх», а 4-й и 5-й шаги — к процессу «спуск». В этот раз картина стала хуже, чем на предыдущем 3-м шаге, поэтому 6-й и 7-й шаги начинают «сдавать назад в гору». После 7-й ступени я уже прошел вершину горы, поэтому изменил длину шага и, наконец, поднялся на «вершину горы» на 8-й ступени, чтобы завершить работу по фокусировке.
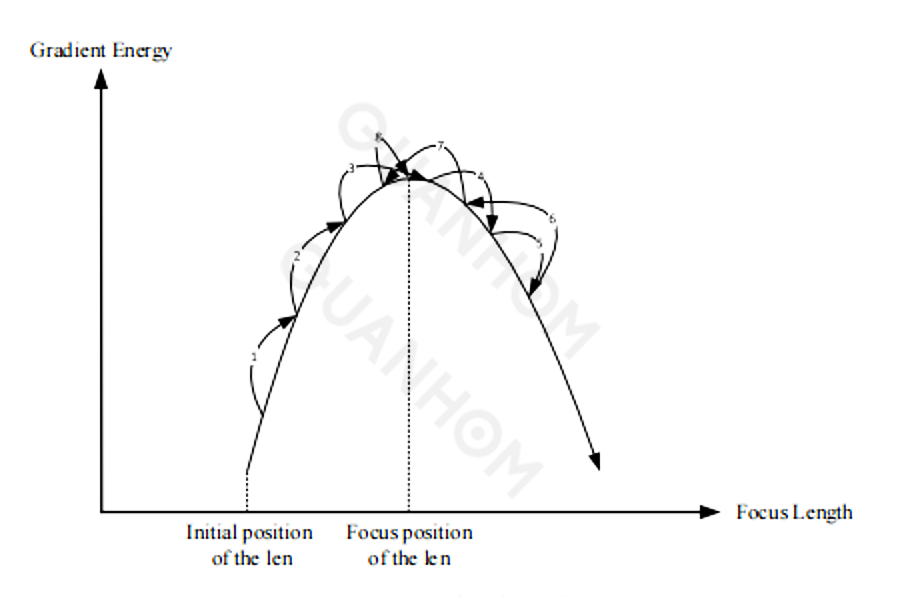
Рис.7 Алгоритм подъема в гору
В реальной работе процесс лазания часто можно завершить за 8 попыток, во время которых необходимо непрерывно регулировать длину шага для достижения цели фокусировки.
3.2 Усовершенствование и реализация алгоритма подъема в гору при автоматической фокусировке инфракрасных линз.
На рисунке 7 показана реализация альпинизма под экраном белого света, что является относительно идеальным. Для инфракрасных изображений с относительно большим шумом в процессе восхождения будет несколько «горных вершин», как показано на рисунке 8.
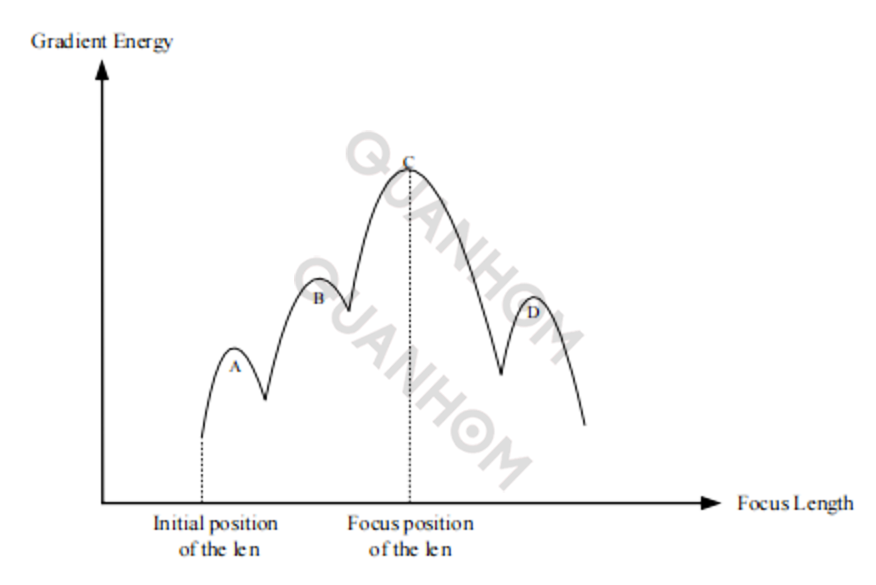
Рис.8 Подъем на гору при фокусировке инфракрасного изображения
A, B и D на рисунке 8 — это «псевдогорные вершины», вызванные шумом на инфракрасном изображении. Согласно стандартному процессу альпинизма, начиная с начального положения линзы для подъема на гору, легко ошибочно принять точку А за вершину горы. В это время цель фокусировки не может быть достигнута. По этой причине в данной статье алгоритм альпинизма для автофокусировки инфракрасного изображения оптимизируется следующим образом.
(1) Конец PS FPGA получает значение энергии градиента, передаваемое концом PL, чтобы определить, стоит ли подниматься на гору. Чтобы уменьшить влияние шума, каждые 3 полученных значения усредняются как основа для альпинизма, то есть для расчета среднего значения трех значений энергии градиента для фиксированного изображения, чтобы уменьшить влияние случайного шума на оценка четкости изображения.
(2) Что касается механизма оценки того, следует ли «повернуться назад и подняться на гору», считается, что на текущей длине шага, если он «спускается с горы» дважды подряд, он начинает оглядываться назад. В соответствии с этим механизмом относительно небольшие пики A и B будут восстанавливать значение энергии градиента во время второго процесса определения, что считается ложным пиком, но эта ситуация не произойдет с истинным пиком C.
На основе двух приведенных выше схем оптимизации процесс автофокусировки на стороне PS на основе FPGA в этой статье показан на рисунке 9.
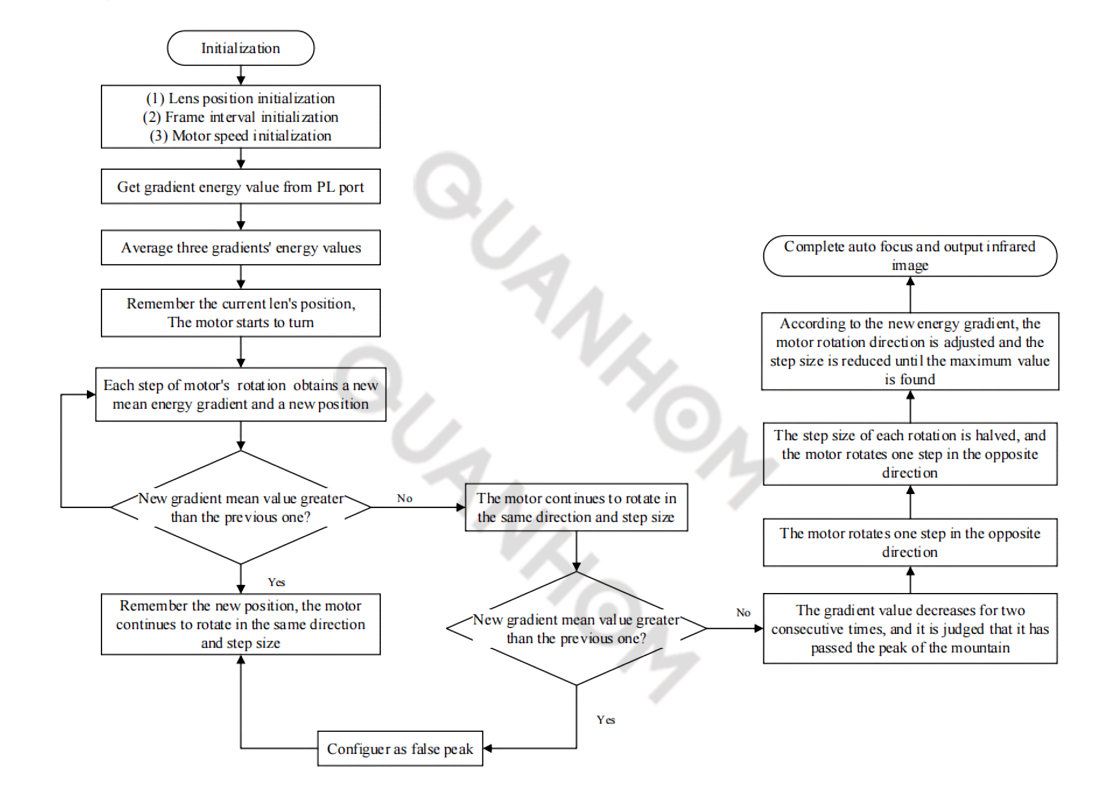
Рис.9 Улучшенный алгоритм восхождения на гору, реализованный на FPGA PS
4 Реализация функции и проверка производительности
4.1 Эффект фокусировки
Воспроизводятся и сравниваются соответственно технология автофокусировки, предложенная в данной статье, и методы автофокусировки, предложенные в литературе [2] и литературе [4]. Как показано на рисунке 10.

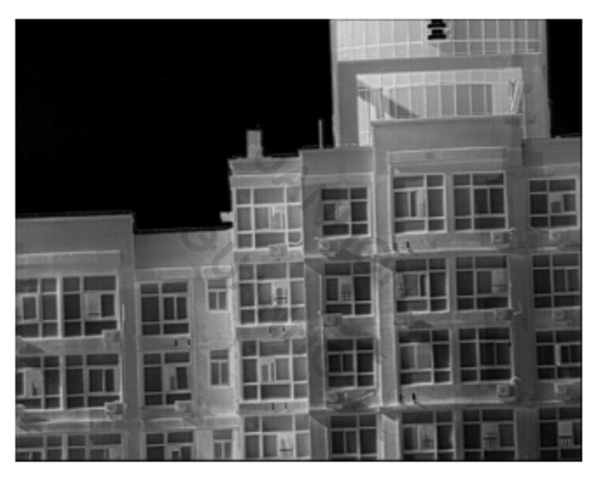
(a) Изображение в видимом свете (b) Исходное изображение в инфракрасном диапазоне
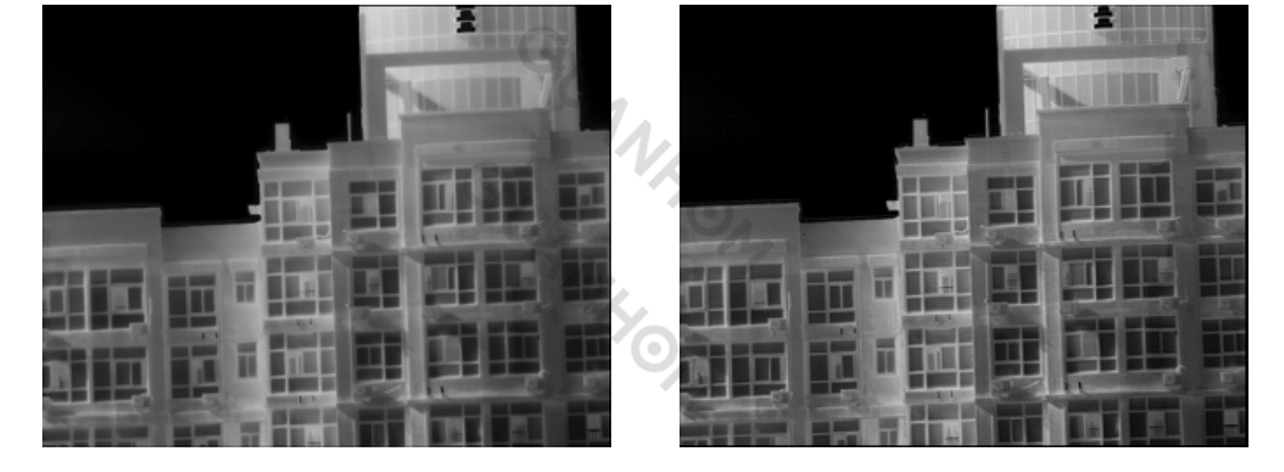
(c) Изображение, реализованное в документе[2] (d) Изображение, реализованное в документе[4]
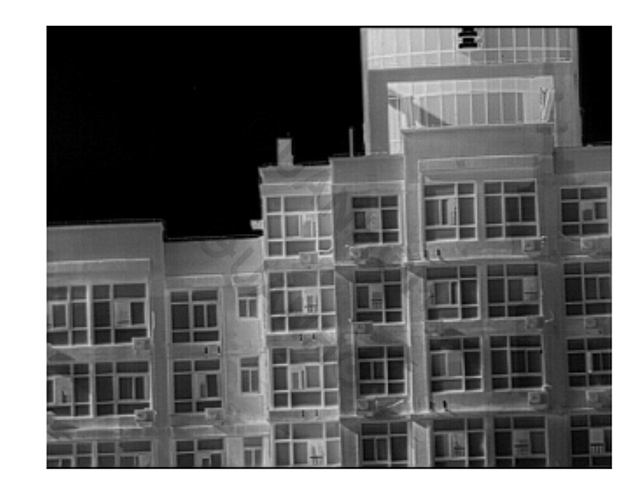
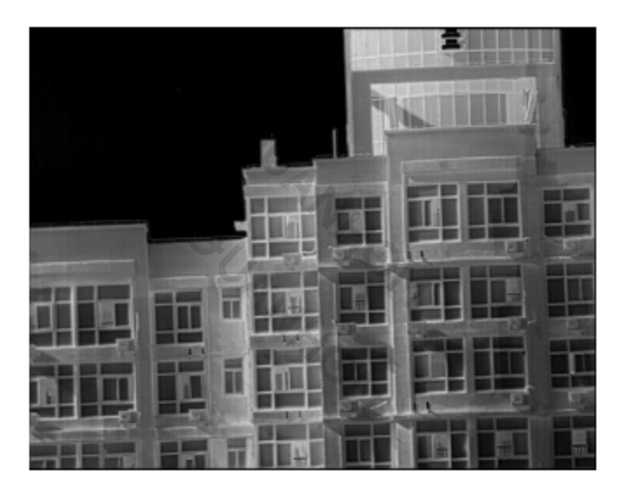
(д) Изображение, полученное с помощью метода, предложенного в этой статье.
Рис.10 Эффект автофокусировки, предложенный в данной статье, сравнивается с другими схемами.
Четыре инфракрасных изображения на рисунке 10 демонстрируют фокусирующий эффект инфракрасной линзы. Поскольку исходное изображение относительно четкое, в этом процессе фокусировки проверяется способность алгоритма фокусировки считывать и обрабатывать детали изображения. Чтобы объективно оценить резкость четырех изображений (b), (c), (d) и (e), для оценки резкости четырех изображений используется «значение дисперсии шкалы серого», предложенное в ссылке [8]. .
По сравнению с размытым изображением, резко сфокусированное изображение должно иметь большую разницу в оттенках серого между его данными, то есть его дисперсия должна быть больше. Резкость изображения можно измерить по дисперсии данных в оттенках серого изображения: чем больше дисперсия, а это означает, что тем лучше четкость.
Рассчитайте значение дисперсии шкалы серого изображения в MATLAB, и результаты показаны в таблице 1.
Таблица 1. Дисперсия серого для четырех изображений
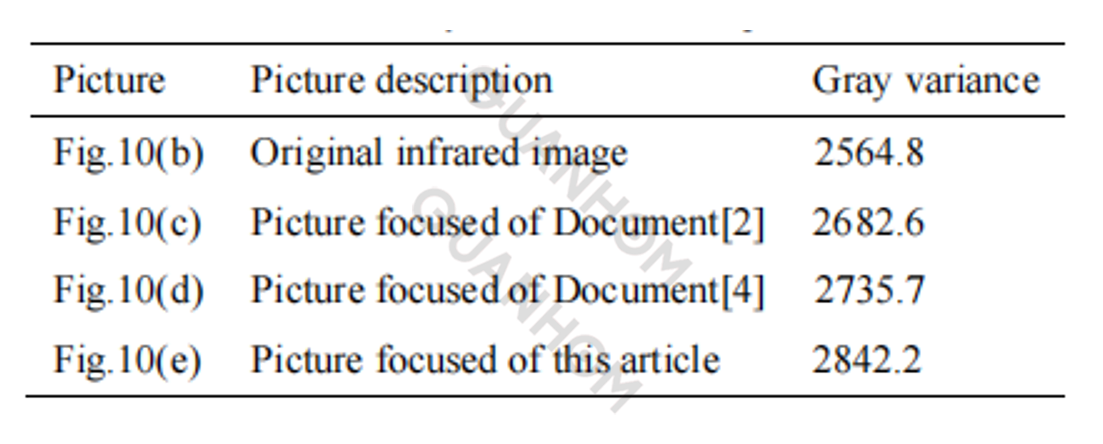
Это видно из рисунка на рисунке 10 и в таблице 1:
Исходное инфракрасное изображение (б) не подвергалось никакой фокусирующей обработке. Хотя изображение может отображать изображение объекта, оно все равно немного размыто невооруженным глазом, а значение его дисперсии по шкале серого относительно невелико, что указывает на недостаточность деталей.
(c) Изображение обрабатывается методом фокусировки изображения в белом свете без учета характеристик шума вертикальных полос инфракрасного изображения, поэтому эффект фокусировки является общим и его можно увидеть по значению дисперсии по шкале серого.
(г) Эффект отображения изображения в некоторой степени улучшен по сравнению с (в), но не может достичь эффекта алгоритма (д), предложенного в данной статье. Должно быть, алгоритм оптимизации процесса восхождения недостаточно хорош.
(д) На рисунке показан эффект сфокусированного отображения, достигаемый с помощью алгоритма, предложенного в этой статье. Хорошо видно, что эффект отображения лучше, чем (d) и (c).
Определяющее качество изображения также можно увидеть по величине значения дисперсии серой шкалы четырех изображений в таблице 1, а изображение после фокусировки алгоритма, предложенного в этой статье, является наиболее четким. Это показывает, что алгоритм, предложенный в этой статье, имеет хорошую производительность и эффект в процессе автофокусировки.
На рисунке 11 сравнивается изображение, отображаемое в фокусе, полученное после вычисления значения энергии градиента всего изображения и вычисления значения энергии градиента 1/3 области. Изображение (б) на рис. 11 — это изображение (д) на рис. 10.
(а) Расчет энергии градиента всего изображения
(б) Расчет энергии градиента изображения 1/3
Рис.11 Сравнение отображения изображения на основе градиентной энергии двух областей
Судя по сравнению двух изображений на рисунке 11, разницы в принципе нет. Разница между среднеквадратическим значением уровня серого составляет менее 1, что показывает, что предложенный в этой статье метод получения значения энергии градиента из центра 1/3 изображения осуществим. Преимущество этого оптимизированного и улучшенного алгоритма заключается в том, что он в значительной степени экономит время автофокусировки и потребление ресурсов FPGA.
4.2 Кривая подъема в гору во время фокусировки
В этом разделе анализируются кривые подъема на холм трех алгоритмов в процессе автофокусировки. Поскольку все восхождение на гору осуществляется на основе вращения двигателя, весь процесс восхождения на гору можно наблюдать по углу вращения двигателя.
Ниже сравниваются три алгоритма (ссылка [2], ссылка [4] и эта статья) в процессе автофокусировки, вращении двигателя и окончательной фокусировке. После предыдущего теста был сделан вывод, что двигатель должен вращаться 751 в положительном направлении от исходного положения до положения фокусировки, которое представляет собой горизонтальную контрольную пунктирную линию на рисунке 12.
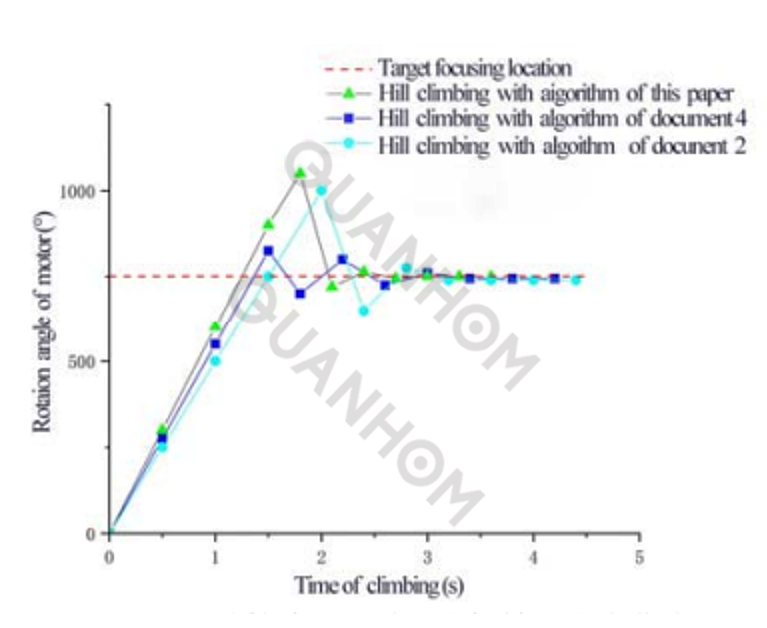
Рис.12 Фокусировочные кривые вращения двигателя при трех алгоритмах восхождения на гору
Это видно из рисунка 12:
(1) Алгоритм восхождения на гору, предложенный в этой статье, имеет относительно большой шаг на ранней стадии, поэтому он может быстро подняться на вершину горы. В конце третьего подъема он превысил вершину горы, поэтому длина шага четвертого подъема уменьшается, чтобы судить, является ли это «псевдовершиной горы»;
(2) Эти три алгоритма более точны при оценке «вершины горы», поскольку само изображение относительно чистое, а шум невелик, поэтому вторичное восхождение, предложенное алгоритмом в этой статье, здесь не играет роли;
(3) Алгоритм, предложенный в этой статье, и алгоритм, предложенный в литературе [4], более отзывчивы, чем алгоритм, предложенный в литературе [2], при оценке тенденции к снижению, и управление лучше;
(4) Алгоритм, предложенный в этой статье, в основном достиг стабильного состояния (конца фокуса) после седьмого подъема и достиг конца фокуса на третей, а два других достигли стабильного состояния после восьмого подъема. Литература [2] Алгоритм в [4] занимает 3,6 с, а алгоритм в [4] — 3,4 с;
(5) Эти три алгоритма имеют различия в размере шага настройки и времени каждой операции, поэтому на рисунке 12 видно, что время процесса набора высоты на ранней стадии относительно стабильно, а время непоследовательно, если нет корректировка на более позднем этапе;
(6) С точки зрения конечного эффекта фокусировки алгоритм, предложенный в этой статье, лучше, чем эффект фокусировки, описанный в литературе [2] и литературе [4], а эффект фокусировки в литературе [2] является худшим, что такой же, как эффект фокусировки, показанный на рисунке 10.
4.3 Проверка времени автофокусировки
Система автофокусировки инфракрасных линз, основанная на архитектуре FPGA, позволяет лучше выполнять работу по автофокусировке. Однопроцессорный режим работы также имеет большое преимущество перед другими архитектурами с точки зрения интеграции продуктов.
В то же время эта система также имеет лучшую производительность в режиме реального времени. Судя по ссылкам, в других схемах время автофокусировки не слишком уточняется. Для конструкции, предложенной в данной статье, управление возможно в течение 5 с от начала съемки до завершения фокусировки. Основной анализ затрат времени показан на рисунке 13. Общее время составляет 3,55 с, что лучше, чем время автофокусировки большинства инфракрасных камер, представленных на рынке.
4.4 Потребление ресурсов FPGA
В этой статье для расчета значения энергии градиента используется 1/3 всего экрана, главным образом для экономии ресурсов FPGA и времени вычислений. Из времени расчета разница между расчетом энергии градиента пикселей всей картинки и расчетом 1/3 площади составляет 42,84-4,76 = 38,08 мс. Хотя это время и невелико для 4,55 с, используемых во всем процессе фокусировки, для работы внутренней программы ПЛИС это относительно большое время.
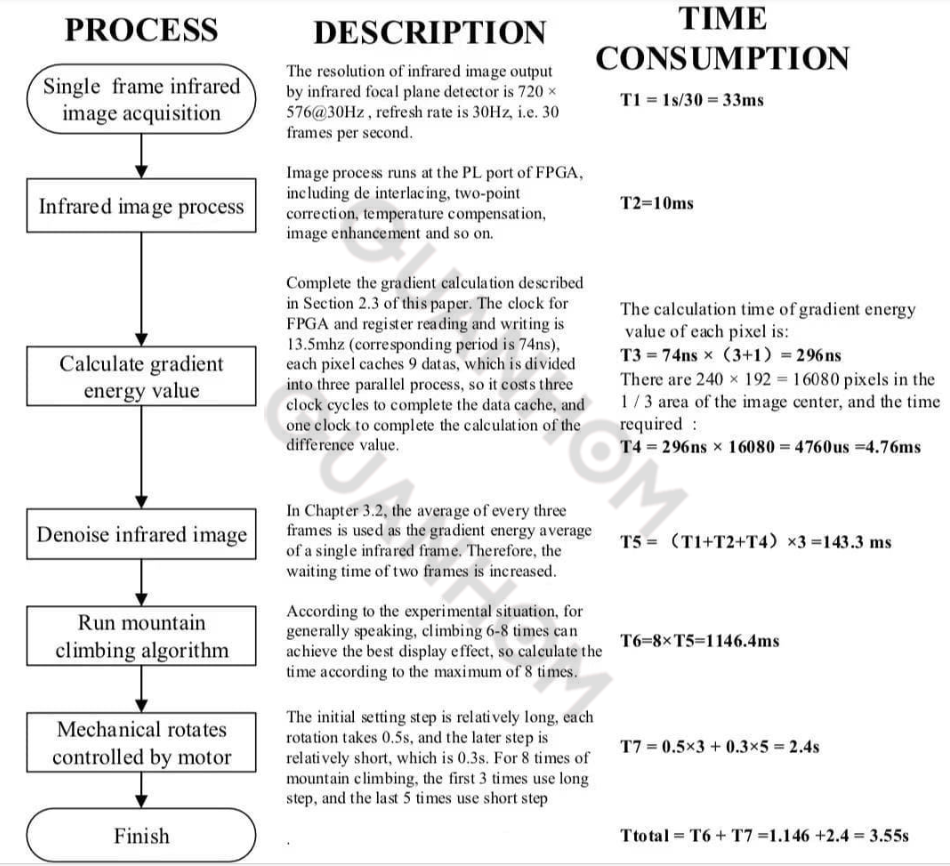
Рис.13 Время, потраченное на автофокусировку
Что касается потребления внутренних ресурсов FPGA, разница между ними также относительно велика. В таблице 2 указано потребление ресурсов FPGA двумя методами.

Из таблицы 2 видно, что использованный в этой статье метод автофокусировки не использует много внутренних ресурсов ПЛИС, даже если это сделать для всего экрана, ресурсов XC7Z030 достаточно. Но для ПЛИС, чем меньше ресурсов используется, тем более управляемой является программа.
В данной статье, направленной на автоматическую фокусировку объектива инфракрасного тепловизора, предлагается технология автофокусировки инфракрасного объектива на основе FPGA. По сравнению с технологией автофокусировки в видимом белом свете и традиционной технологией инфракрасной фокусировки технология, предложенная в этой статье, имеет три основных улучшения:
①Вся машина использует один процессор FPGA для обработки инфракрасного изображения, отображения и фокусировки объектива, что значительно улучшает интеграцию продукта;
② С учетом характеристик инфракрасных изображений и преимуществ параллельной обработки данных FPGA предлагается улучшенный алгоритм градиентной энергии, который может действительно оценить четкость инфракрасных изображений;
③В соответствии с характеристиками инфракрасных изображений алгоритм альпинизма улучшен и оптимизирован для эффективной фильтрации ложных вершин гор и достижения цели альпинизма.
Эта статья подтверждает три вышеупомянутых технических улучшения, а результаты также подтверждают превосходство алгоритма, предложенного в этой статье. В настоящее время технология автофокусировки, предложенная в этой статье, широко применяется в тепловизорах, ее функции и производительность находятся на передовом уровне в отрасли и имеют хорошее рекламное значение. Будучи многолетним экспертом в области инфракрасных тепловизионных камер, Куанхом может поделиться некоторыми профессиональными и всесторонними знаниями в области инфракрасной оптики.
Как опытный производительОптико-электромеханические компонентыКомпания Quanhom стремится предоставить пользователям различные тепловизионные инфракрасные камеры (LWIR, MWIR и SWIR) превосходного качества. Мы имеем хорошую репутацию в отрасли благодаря передовым технологиям исследований и разработок и превосходным технологиям производства. Наша продукция продается по всему миру и получила похвалу и доверие многих клиентов. Если вы хотите узнать больше о наших сопутствующих услугах, вы можете отправить нам свои потребности, и мы дадим вам удовлетворительный ответ как можно скорее.
Авторы: Сунь Шаовэй, Ян Юэтао, Ян Бинвэй, Ван Аньцзюнь, Чжун Хайлинь
Источник журнала: Том 43 № 5 Инфракрасные технологии, май 2021 г.
Дата получения: 07.11.2020; Дата редакции: 24 марта 2021 г.
Использованная литература:
[1] ЖАО Жибин. Исследование технологии автоматической фокусировки камеры видимого света для бортовой фотоэлектрической платформы [D]. Высшая школа Китайской академии наук (Чанчуньский институт оптики, точного машиностроения и физики), 2010 г.
[2] Н.И. Вэньцзя. Система видеомониторинга с автофокусировкой на базе FPGA[D]. Ухань: Уханьский технологический университет, 2012.
[3] ЛИ Шэньян. Алгоритм автофокусировки, основанный на значении энергии инфракрасного изображения [Дж]. Электронные технологии Шаньси, 2014(4): 6-9.
[4] ЧЖАН Бо, ЧЖАН Ган, ЧЭН Юнцян. Конструкция видеопроцессора с функцией автоматической фокусировки[J]. ЖК-дисплей и дисплей, 2010, 25(3): 396-400.
[5] ВАН Сяофань, ЛЮ Яовэнь, ЧЖАН Дунъянь. Проектирование онлайн-системы инфракрасного тепловизора с автофокусировкой[J]. Инфракрасные технологии, 2018, 40(8): 743-748.
[6] ВАН Цзянь. Исследование технологии автоматической фокусировки на основе обработки изображений[D]. Чэнду: Высшая школа Китайской академии наук (Институт оптоэлектронных технологий), 2013.
[7] Сюй Чжили. Исследование системы автофокусировки РЭМ на базе FPGA[D]. Нанкин: Юго-Восточный университет, 2016.
[8] ЧЭНЬ Годжин, Чжу Мяофэнь, ЧЖАН Кэсон. Исследование функции оценки резкости процесса фокусировки изображенияk[J]. Сбор и обработка данных, 2009, 24(2): 165-169.